
Since 1908, when the Ford Model T was introduced, many improvements have been made to the better automobiles. These days, there are two main areas such as “Connected Vehicles” and “Automated Vehicles” in which rapid technological developments are occurring.
Connected Vehicles (CV) >>
CVs are capable of communicating with each other (Vehicle-to-Vehicle or V2V), with roadside infrastructure, such as traffic control signals (Vehicle-to-Infrastructure or V2I and vice versa), or with other devices, such as mobile phones carried by road users (V2X) [1].

Autonomous Vehicles (AV) >>
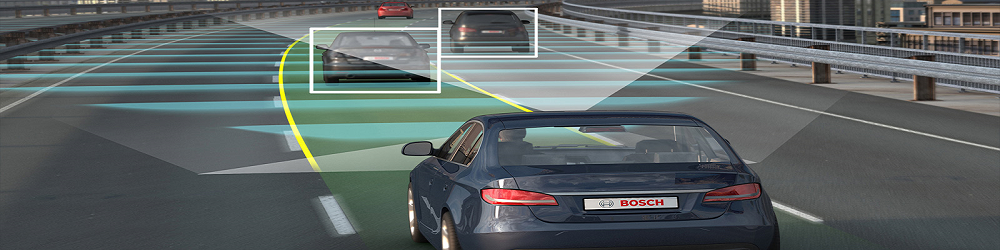
AVs are vehicles where some aspects of a safety-critical control function such as steering, throttle control or braking occurs without direct driver input. They use onboard sensors, cameras, GPS and telecommunications to obtain and analyze information using complex computer algorithms, and respond appropriately by effectuating control in safety-critical situations [1].
SAE (Society of Automotive Engineers) [4] and NHTSA (National Highway Safety Administration) [5] define five levels of autonomous vehicles:
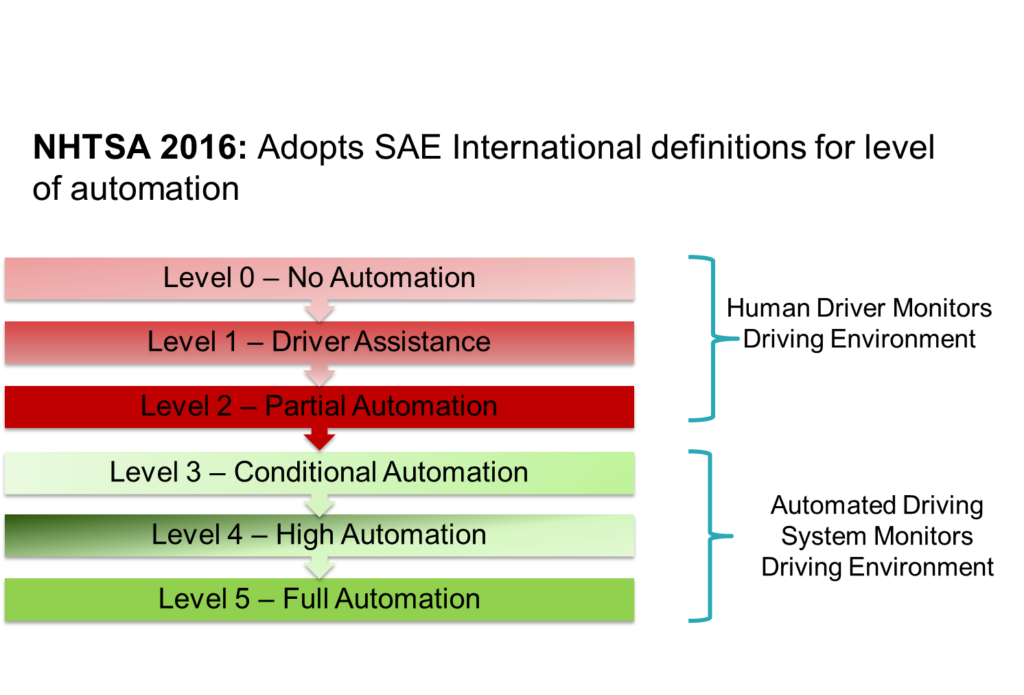
Level 0: No Automation – The driver is in full control of the vehicle at all times managing the operational and tactical aspects of driving tasks.
Level 1: Driver Assistance – some automated assistance through control of vehicle speed and lane position. At this level the driver is required to take over the vehicle at any instance, thereby requiring hands on the steering wheel at all times and feet near the brake and acceleration pedals.
Level 2: Partial Automation – the execution of steering and acceleration/deceleration are carried out by driver assistance systems. All other operational and tactical aspects of driving are carried out by the driver.
{kind=link}
Level 3: Conditional Automation – The execution of steering, acceleration/deceleration and the monitoring of environment are carried out by the vehicles. When the vehicle is in control, the driver is not required to monitor at all times but is required to take control when required (upon request to intervene).
Level 4: High Automation – driving systems contribute to full self-driving under certain conditions. Under such conditions, e.g. urban ride sharing, the vehicle drives without human intervention. The role of the driver is only to provide the destination.
Level 5: Full Automation – full self-driving capabilities under all conditions. The vehicle can drive without any human input and without a driver/passengers.
Difference between CV and AV
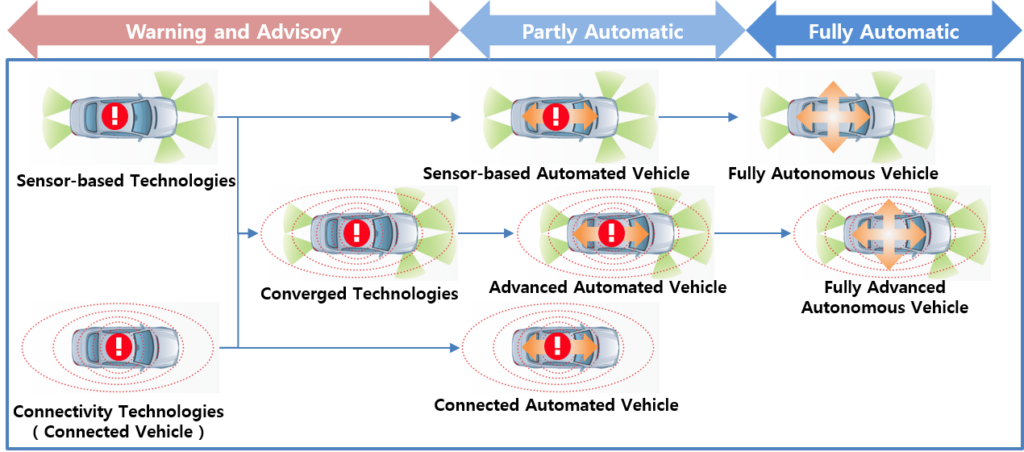
The word “Autonomous” means that it is independent or self-sufficient. Therefore, the autonomous vehicles gets information they need by using its own on-board sensors. Also, it operates independently of all other vehicles and infrastructure [1]. By contrast, the connected vehicles gets the information by using a communication technology such as the V2X from other vehicles and roadway infrastructures. An automated vehicle, which uses sensor-based technologies, can become a fully autonomous vehicle. On the other hand, an automated vehicle, which uses connectivity technologies, cannot become a fully autonomous vehicle. This is because that an automated vehicle using connectivity technologies always need help of other vehicles and infrastructures to get information they need. However, converged technologies, formed from a combination of sensor-based technologies and connectivity technologies, can enhance performances of the automated vehicle and provide advanced solutions to them by covering limitations of the each technologies. Lastly, connected vehicles need well-made infrastructures and a strong standards among systems, but vehicles using sensor-based technologies do not need that. Therefore, government organizations or international organizations usually lead and deal with connectivity technologies such as connected vehicles, and traditional automakers or private corporations lead and focus on sensor-based technologies to develop autonomous vehicles.
References
[1] A. Somers and K. Weeratunga, “Automated Vehicles: Are we ready?,” Main Roads Western Australia, 2015.
[2] “Connected Vehicle Technology,” [Online]. Available: https://www.its.dot.gov/landing/cv.htm. [Accessed 15 May 2015].
[3] “Bosch develops systems for autonomous vehicles,” 29 January 2013. [Online]. Available: https://www.traffictechnologytoday.com/news.php?NewsID=46132. [Accessed 15 May 2015].
[4] NHTSA (2016) Federal Automated Vehicles Policy. Washington, DC: National Highway Safety Administration. “Federal Automated Vehicles Policy.” NHTSA. National Highway Traffic Safety Administration, Sept. 2016. Web. 18 Apr. 2017. <https://one.nhtsa.gov/nhtsa/av/av-policy.html>.
[5] SAE (2016) Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. “Automated Driving.” SAE. SAE International, Jan. 2014. Web. 18 Apr. 2017. <https://www.sae.org/misc/pdfs/automated_driving.pdf>.