
US

<US Connected project timeline> [1]
VSC (Vehicle Safety Communication) (2002~2004)
|
|
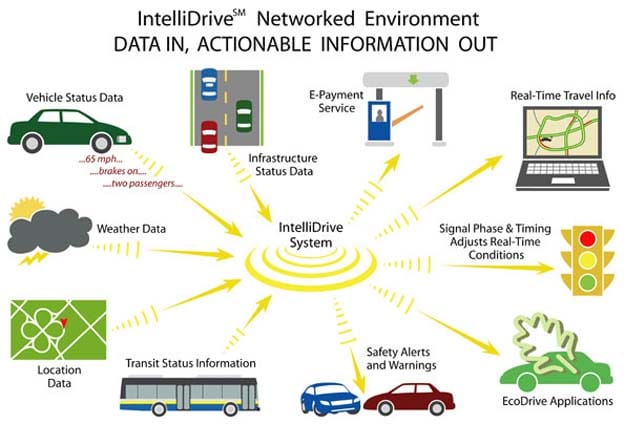
IntelliDrive / VII (Vehicle Infrastructure Integration) (2004~2009)
|
|
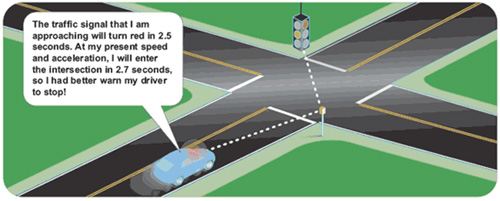
CICAS (Cooperation Intersections Collision Avoidance System) (2004~2009)
|
|
VSC-A (Vehicle Safety Communications-Applications) (2006~2009)
|
|
SafeTrip21 (Safe and Efficient Travel through Innovation and Partnerships for the 21st Century) (2008~2011)
|
|
Connected Vehicle Research (2011~Ongoing)
|
|
Safety Pilot (2011~2014)
|
|
• Machine Learning & Artificial Intelligence
|

Europe
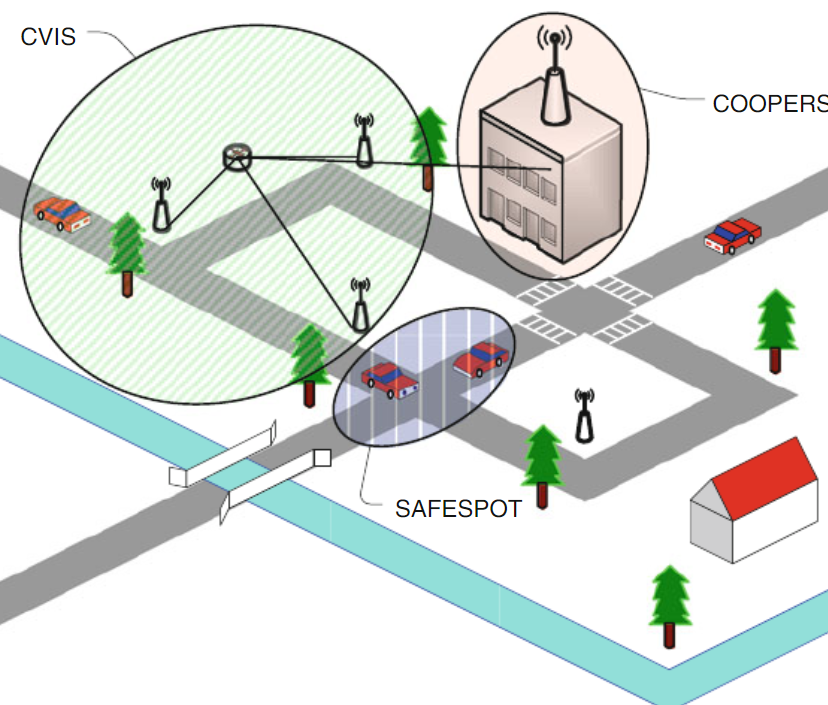
<CVIS, SAFESPOT and COOPERS vision> [1]
CVIS (Cooperative Vehicle Infrastructure Systems) (2006~2010)
|
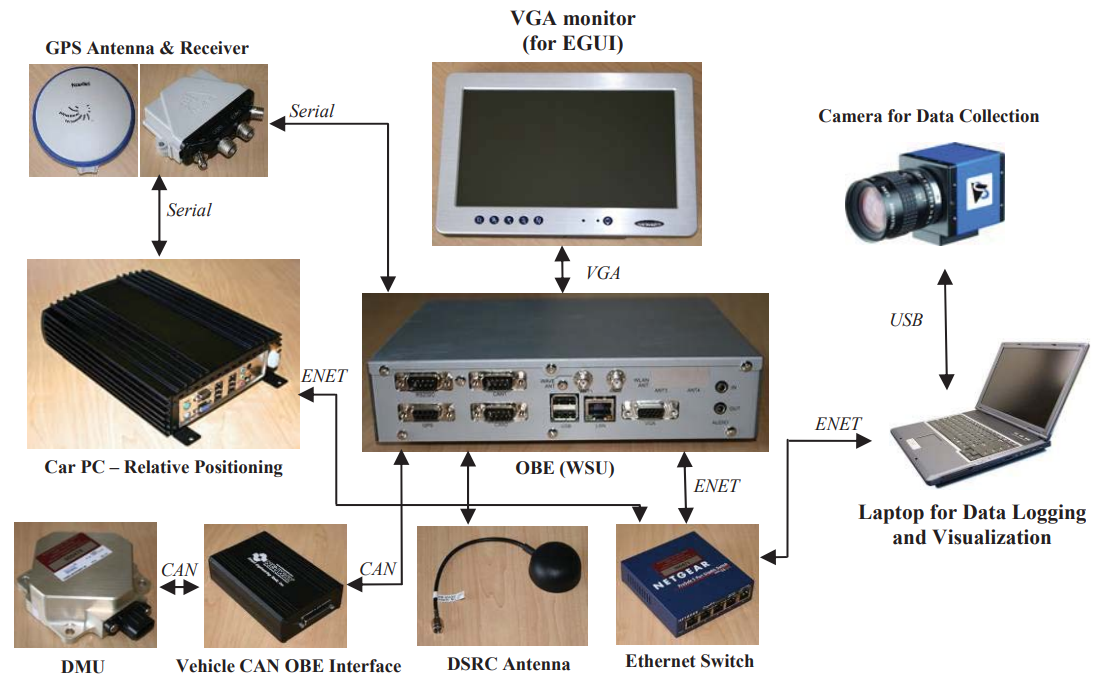
<CVIS technology> [12] |
SAFESPOT (Integrated Project Cooperative Systems for Road Safety) (2006~2010)
|
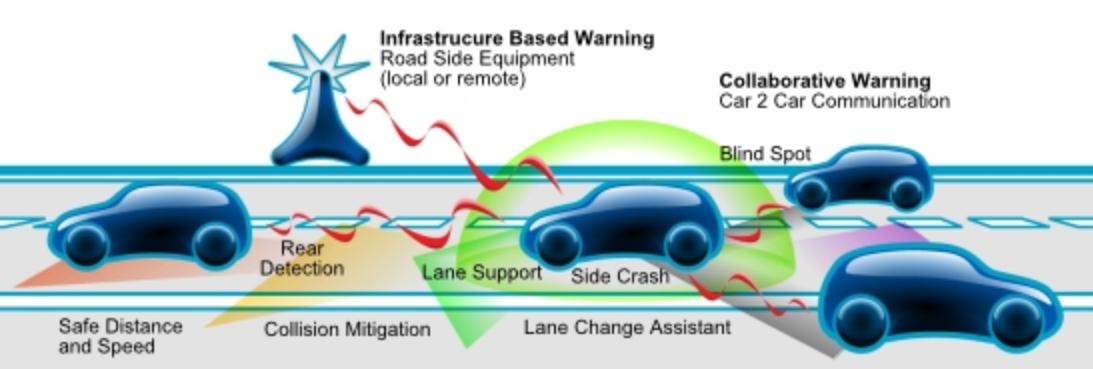
<SAFESPOT technology> [13] |
COOPERS (CO-OPERrative System for intelligent road safety) (2006~2010)
|
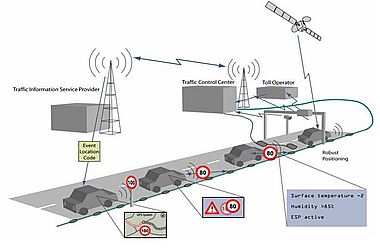
<COOPERS technology> [15] |
PRECIOSA (PRivacy Enabled Capability In co-Operative Systems and Safety Applications) (2008–2010)
|
|
PREDRIVE C2X (PREparation for DRIVing implementation and Evaluation of C- 2-X Communication technology) (2008–2010)
|
|
DRIVE C2X (DRIVing implementation and Evaluation of C2X communication technology in Europe) (2011–2014)
|
<DRIVE C2X technology> [18] |
COMeSafety2 (Communications for eSafety 2) (2011~2013)
|
<COMSafety2 system> [20] |



Japan

[ITS Green Safety in Japan] [21]
VICS (Vehicle Information And Communication System) (1995~2003)
|
<VICS technology> [22] |
ITS SPOT (2009)
|
<ITS SPOT technology> [21] |
DSSS (Driving Safety Support Systems) (2011~ Ongoing)
|
<DSSS technology> [21] |
ASV Project (Advanced Safety Vehicle) (1991~Ongoing)
|
|
Smartyway (2006~2010)
|
<Smartway technology> [21] |
ITS-Safety 2010 (2006 ~ 2010)
|



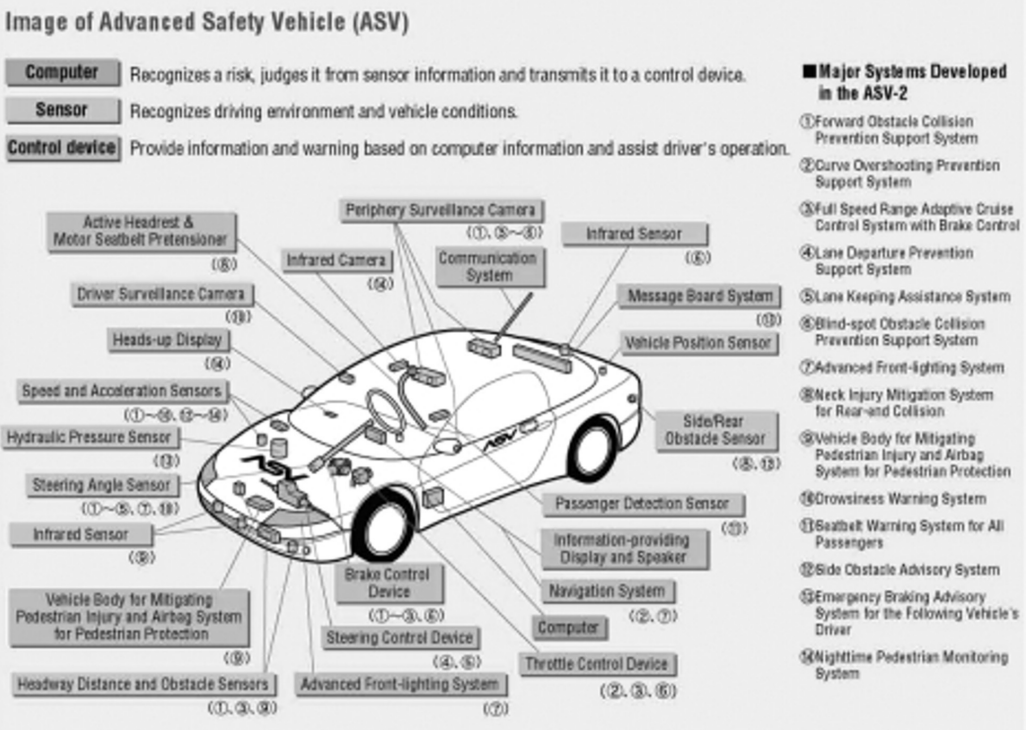 <ASV technology> [27]
<ASV technology> [27]
South Korea
U-transportation (Ubiquitous Transportation) (2006~2012)
|
<U-transportation technology> [30] |
Smart Highway (2008~2014)
|
<Smart Highway technology> [33] |

References
[1]J. M. León-Coca, D. G. Reina, S. L. Toral, F. Barrero and N. Bessis, “Intelligent Transportation Systems and Wireless Access in Vehicular Environment Technology for Developing Smart Cities,” in Big Data and Internet of Things: A Roadmap for Smart Environments, Springer International Publishing, 2014, pp. 285-313.
[2]The CAMPVehicle safety communications consortium, “Vehicle safety communications project task 3 final report: identify intelligent vehicle safety applications enabled by DSRC,” U.S. Department of Transportation-National Highway Traffic Safety Administration, 2005.
[3]”VSC-A Vehicle communicatins,” [Online]. Available: http://www.docstoc.com/docs/148550571/VSC-A-Vehicle-Safety-Communications. [Accessed 15 May 2015].
[4]R. Kandarpa, M. Chenzaie, J. Anderson, J. Marousek, T. Weil, F. Perry, I. Schworer, J. Beal and C. Anderson, “Final report: vehicle infrastructure integration proof of concept results and findings-Infrastructure,” U.S. Department of Transportation, 2009.
[5]”USDOT to Host Driver Clinics for Connected Vehicles,” 18 May 2011. [Online]. Available: http://www.thedetroitbureau.com/2011/05/usdot-to-host-driver-clinics-for-connected-vehicles/. [Accessed 15 May 2015].
[6]”Cooperative Intersection Collision Avoidance Systems (CICAS),” 28 May 2015. [Online]. Available: http://www.its.dot.gov/cicas/. [Accessed 28 May 2015].
[7]”The ITS Research Initiatives, Programs, and Related Research,” [Online]. Available: http://ntl.bts.gov/lib/jpodocs/repts_te/14289/plan2-5.htm. [Accessed 15 May 2015].
[8]Crash Avoidance Metrics Partnership on behalf of the Vehicle Safety Communications 2 Consortium, “Vehicle Safety Communications – Applications (VSC-A) Final Report,” NHTSA Headquarters and Research and Innovative Technology Administration, 2011.
[9]Science Applications International Corporation (SAIC), “National Evaluation Of The Safetrip-21 Initiative: Combined Final Report,” Research And Innovative Technology Administration (RITA), 2011.
[10]”What is the Safety Pilot Model Deployment?,” [Online]. Available: http://safetypilot.umtri.umich.edu/. [Accessed 15 May 2015].
[11]”U.S. DOT and UMTRI Launch Connected Vehicle Safety Pilot Program,” 21 August 2012. [Online]. Available: http://www.automotive-fleet.com/news/story/2012/08/u-s-dot-and-umtri-launch-connected-vehicle-safety-pilot-program.aspx. [Accessed 15 May 2015].
[12]”Communication between vehicles and the road,” [Online]. Available: http://www.dlr.de/en/DesktopDefault.aspx/tabid-667/7411_read-14634/gallery-1/gallery_read-Image.1.7341/. [Accessed 15 May 2015].
[13]”SAFESPOT Integrated Project,” [Online]. Available: http://www.safespot-eu.org/. [Accessed 15 May 2015].
[14]”COOPERS,” [Online]. Available: http://www.coopers-ip.eu/. [Accessed 15 May 2015].
[15]”EU-Kommission legt Frequenzen für Fahrzeugkommunikation fest,” [Online]. Available: http://www.golem.de/0808/61546.html. [Accessed 15 May 2015].
[16]”PRECIOSA,” [Online]. Available: http://www.preciosa-project.org. [Accessed 15 May 2015].
[17]R. Stahlmann, A. Festag, A. Tomatis, I. Radusch and F. Fischer, “Starting European field test for Car-2-X communication: The Drive C2X Framework,” in 18th ITS World Congress and Exhibition, 2011.
[18]”Drive-C2X,” [Online]. Available: http://www.drive-c2x.eu/technology. [Accessed 15 May 2015].
[19]”ERTICO,” [Online]. Available: http://ertico.com/. [Accessed 15 May 2015].
[20]”COMSafety2,” [Online]. Available: http://www.comesafety.org/. [Accessed 15 May 2015].
[21]”ITS GREEN SAFETY SHOWCASE,” [Online]. Available: http://www.its-jp.org/english/its-green-safety-showcase/. [Accessed 15 May 2015].
[22]”How VICS works,” [Online]. Available: http://www.vics.or.jp/english/vics/index.html. [Accessed 15 May 2015].
[23]S. SUZUKI, F. KANAZAWA and T. TSUKIJI, “Towards Safer and More Efficient Road Traffic with Existing Road Networks and Cooperative ITS Service – Case of ‘ITS Spot Service’ in Japan.,” ITS Asia Pacific Forum 2014, 2014.
[24]European Commission, “Energy ITS Workshop, UMTS Symposium and Smartway/DSSS/ASV Demonstrations, Tokyo, Japan 24-27 February 2009.,” European Commission, 2009.
[25]I. Paromtchik and C. Laugier, “The Advanced Safety Vehicle Programme,” Scientific Commons, 2007.
[26]Y. Furukawa, “Overview of R&D on Active Safety in Japan,” Car to Car Consortium, 2006.
[27]K. ISHIDA, “Development of ASV in Japan – ASV Promotion Project, Phase3,” MLIT.
[28]R. Harris, “ITS and the latest developments that contribute to road safety,” World Road Association, 2010.
[29]G. Karagiannis, O. Altintas, E. Ekici, G. Heijenk, B. Jarupan, K. Lin and T. Weil, “Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions,” Communications Surveys & Tutorials, vol. 13, no. 4, pp. 584-616, 2011.
[30]”The Korea Transport Institute,” [Online]. Available: https://www.koti.re.kr/. [Accessed 15 May 2015].
[31]”SMART Highway: Opening the future of high-tech road transport system by Korea Expressway Corporation,” [Online]. Available: http://www.ksce.or.kr/newsletter/130820/pdf/10_2(7).pdf. [Accessed 15 May 2015].
[32]I. Bearder, “SMART HIGHWAY: Korea Aiming to Build the World’s Most Intelligent Highways,” 3 September 2013. [Online]. Available: http://www.erticonetwork.com/ertico-news/entry/1177-smart-highway-korea-aiming-to-build-the-world%E2%80%99s-most-intelligent-highways. [Accessed 15 May 2015].
[33]”SmartHighway,” [Online]. Available: http://www.smarthighway.or.kr. [Accessed 15 May 2015].
[34]”Ford Invests in ARGO AI, In Drive for Autonomous Vehicle Leadership.” Ford. N.p., 10 Feb. 2017. Web. 18 Apr. 2017. [Online]. Available:https://media.ford.com/content/fordmedia/fna/us/en/news/2017/02/10/ford-invests-in-argo-ai-new-artificial-intelligence-company.html